Surgical Activity Recognition
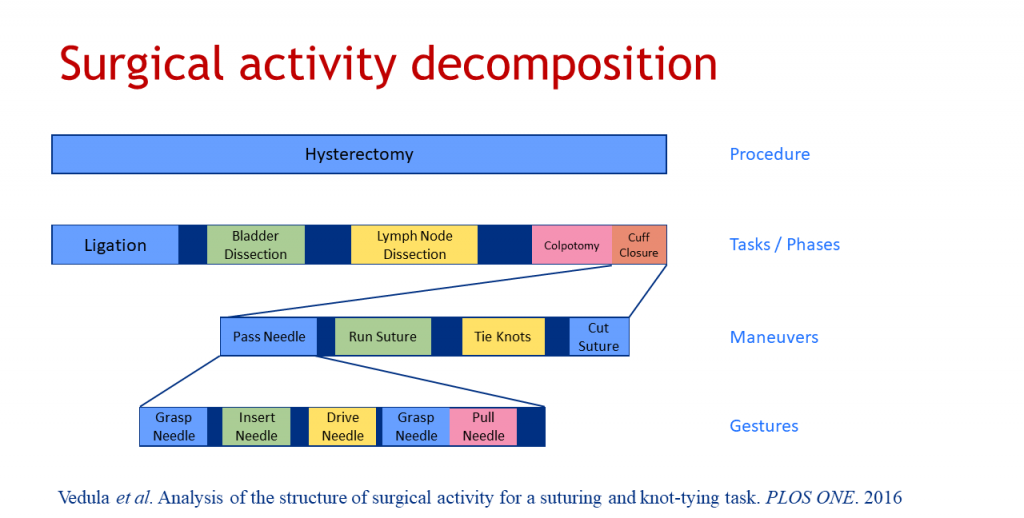
In our paper analyzing surgical activity within surgical tasks [LINK] we outline a hierarchical decomposition of the intraoperative surgical process from the surgeon’s perspective. We proposed four levels of surgical activity: procedure, phase / task, maneuver, and gesture. For example, the figure below shows the decomposition of a hysterectomy procedure. The procedure goes through phases like ligation (dissection of ligaments), bladder dissection,lymph node dissection, colpotomy, and vaginal cuff closure (suturing). Within vaginal cuff closure, a series of maneuvers need to be performed, e.g., needle passing, running the suture, tying knots, cutting extra suture. Furthermore, each maneuver is composed of a sequence of gestures like grasping the needle, positioning the needle, driving it through the tissue, pulling it out, and so on.
We have developed algorithms based on machine learning methods that can analyze surgical video images and/or instrument motion data to predict what activity is performed at a given time instant during the surgery. According to the granularity of the activity being predicted we term the problem as phase recognition, maneuver recognition, and gesture recognition.
- Vedula SS, Malpani AO, Tao L, Chen G, Gao Y, Poddar P, Ahmidi N, Paxton C, Vidal R, Khudanpur S, Hager GD, Chen CCG. Analysis of the structure of surgical activity for a suturing and knot-tying task. PLOS ONE. 2016 Mar 7;11(3):e0149174.
- DiPietro R, Ahmidi N, Malpani A, Waldram M, Lee GI, Lee MR, Vedula SS, Hager GD. Segmenting and classifying activities in robot-assisted surgery with recurrent neural networks. Int J Comput Assist Radiol Surg. 2019 Apr 29; PMID: 31037493